Construction History - 10/02/01
| Home | October 2, 2001 | November 14, 2001 | January 15, 2002 |

IRRIGATOR
Construction History - 10/02/01| Home | October 2, 2001 | November 14, 2001 | January 15, 2002 | |
IRRIGATOR |
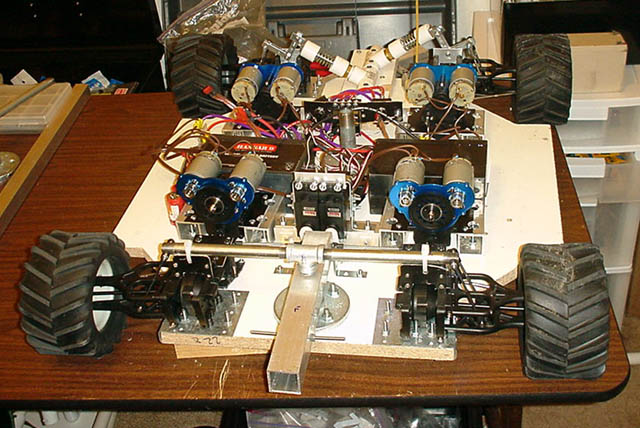
October 2, 2001 - Current weight: ~45 pounds. Without self-righting arm mechanism, bumpers, or covers. This is the test version of the robot to test drivetrain. If the text on this page don't make sense, nevermind because its mainly notes to myself.
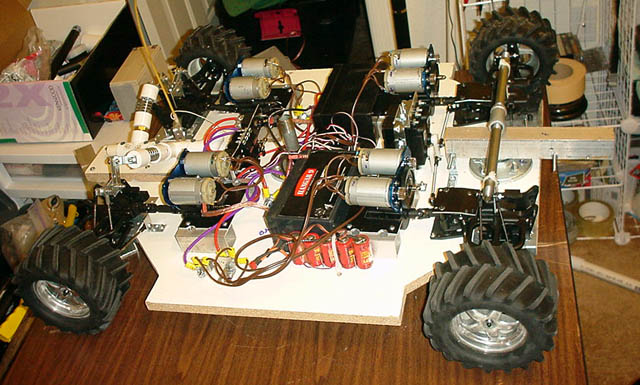 This uses stock Traxxas EMAXX gearboxes, center universal axles, differential, and suspension arms. One set of these for each corner. I suspected the stock universal drive axles to the tires wouldn't be able to handle the load, and sure enough, within 30 seconds of the first trial run, the axles twisted in half. After that I added MIP CVDs. Current concerns: Might break CVDs too, diff gears might strip, arms are too weak, and even after market aluminum arms might be too weak. Powered by two 12 volt, 7aH gel cells hooked in parallel. Eight 550 size rc car motors that I got at American Surplus for $2.50 each, also hooked in parallel, 12 volts going to each motor. Will need to experiment with hooking the 2 batteries in series (24 volts) and hooking pairs of motors in series (back to 12 volts per motor). 1700 mah 5 cell receiver battery. Needed the larger amperage receiver battery to power the strong 1/4 scale servos.
This uses stock Traxxas EMAXX gearboxes, center universal axles, differential, and suspension arms. One set of these for each corner. I suspected the stock universal drive axles to the tires wouldn't be able to handle the load, and sure enough, within 30 seconds of the first trial run, the axles twisted in half. After that I added MIP CVDs. Current concerns: Might break CVDs too, diff gears might strip, arms are too weak, and even after market aluminum arms might be too weak. Powered by two 12 volt, 7aH gel cells hooked in parallel. Eight 550 size rc car motors that I got at American Surplus for $2.50 each, also hooked in parallel, 12 volts going to each motor. Will need to experiment with hooking the 2 batteries in series (24 volts) and hooking pairs of motors in series (back to 12 volts per motor). 1700 mah 5 cell receiver battery. Needed the larger amperage receiver battery to power the strong 1/4 scale servos.
 Front view. Aluminum bar sticking forward might be used for some kind of bumper or weapon (spike?, sprinkler head?).
Front view. Aluminum bar sticking forward might be used for some kind of bumper or weapon (spike?, sprinkler head?).

 The galvanized pipe was used instead of suspension springs. Much simpler. The rear end still shows a suspension spring setup with a L-shaped cantilever arm connected to the bulkhead (see first and second picture). That spring setup will be replaced with this setup, or something better. Major problem with the spring setup was that it put large stress on the bulkheads, wanting to pull them upwards apart from the chassis. Bulkheads would probably strip out from the 4 screws holding them down. As shown in this picture, the force of the robot's own weight and/or pounding of chassis from hammers will be transfered straight to the galvanized pipe, not the bulkhead. The white pull strap is not too tight. Current concerns: Linkages from lower arm to galvanized pipe might break off or bend. Lower arm too weak, might break, especially if damaged from Battlebot arena killsaws. Possible solution: extend galvanized pipe all the way to tire steering knuckle and add the pivot ball to end to galvanized pipe, replacing the entire upper arm and eliminating the need for the 2 linkages. Weight will rest on upper arm rather than lower arm.
The galvanized pipe was used instead of suspension springs. Much simpler. The rear end still shows a suspension spring setup with a L-shaped cantilever arm connected to the bulkhead (see first and second picture). That spring setup will be replaced with this setup, or something better. Major problem with the spring setup was that it put large stress on the bulkheads, wanting to pull them upwards apart from the chassis. Bulkheads would probably strip out from the 4 screws holding them down. As shown in this picture, the force of the robot's own weight and/or pounding of chassis from hammers will be transfered straight to the galvanized pipe, not the bulkhead. The white pull strap is not too tight. Current concerns: Linkages from lower arm to galvanized pipe might break off or bend. Lower arm too weak, might break, especially if damaged from Battlebot arena killsaws. Possible solution: extend galvanized pipe all the way to tire steering knuckle and add the pivot ball to end to galvanized pipe, replacing the entire upper arm and eliminating the need for the 2 linkages. Weight will rest on upper arm rather than lower arm.
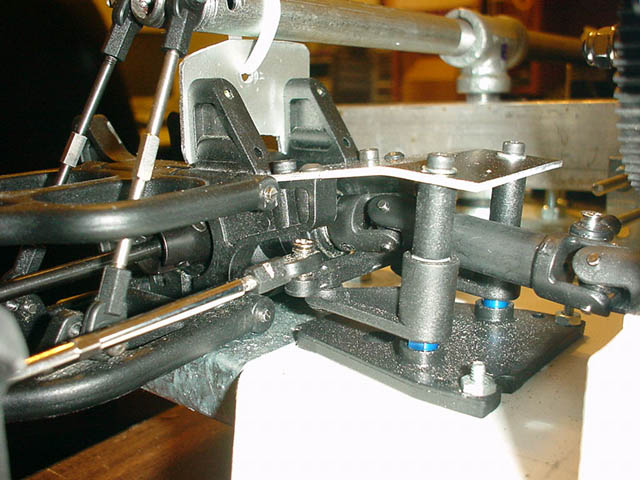 Closeup of bulkhead with center universals and steering mechanism. Oh, steering blocks is also from EMAXX. Had to cut an aluminum plate to suppport the top of the steering blocks.
Closeup of bulkhead with center universals and steering mechanism. Oh, steering blocks is also from EMAXX. Had to cut an aluminum plate to suppport the top of the steering blocks.
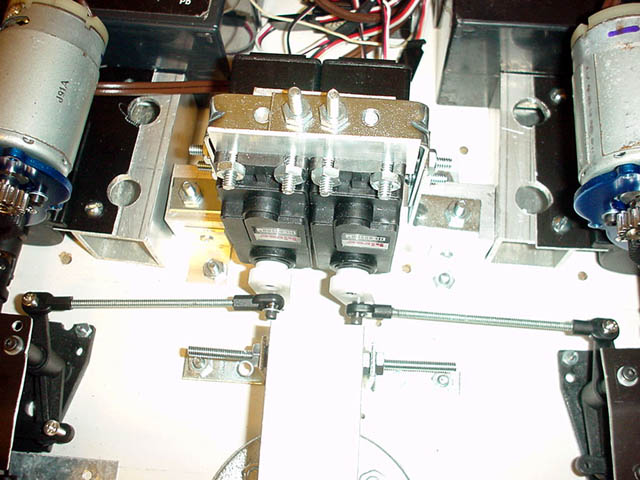 Two Hitec HS-805BB servos. Quarter scale servos. Will probably connect a linkage between the 2 servos so they share the load. This will help prevent stripping servo gears. Possible problem: if connected and they fail, I lose both servos.
Two Hitec HS-805BB servos. Quarter scale servos. Will probably connect a linkage between the 2 servos so they share the load. This will help prevent stripping servo gears. Possible problem: if connected and they fail, I lose both servos.
 Irrigater box. An awesome cover. Removable cover for easy access is best feature, other than its strength. Will need to shrink chassis quite a bit to make components fit inside. Good, doing so will help reduce weight. Self-righting arm will be mounted half inside and half outside the top green cover of the box.
Irrigater box. An awesome cover. Removable cover for easy access is best feature, other than its strength. Will need to shrink chassis quite a bit to make components fit inside. Good, doing so will help reduce weight. Self-righting arm will be mounted half inside and half outside the top green cover of the box.
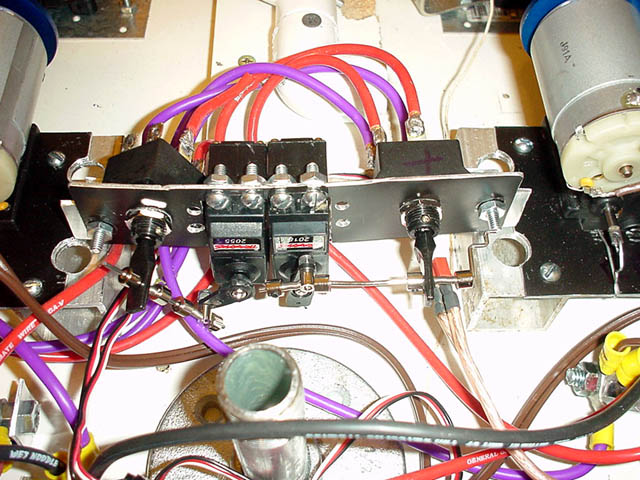 Rinky dink temporary speed controller using 2 servos and 2 radio shack switches. No half throttle, its all or nothing, and no reverse, but at least its cheap and I could test the EMAXX drivetrain until I get my Vantec speed controller.
Rinky dink temporary speed controller using 2 servos and 2 radio shack switches. No half throttle, its all or nothing, and no reverse, but at least its cheap and I could test the EMAXX drivetrain until I get my Vantec speed controller.
With irrigation cover. Still need to add wheel protection. |

Without body. Chassis has been shrunk down and components shifted closer together in this drawing in order to fit in irrigation box. |
Closeup. |